Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
title: “ROS2 humble” excerpt: “ Docker file and docker build. “ —
Published:
The paper discusses Fully Convolutional Networks for Semantic Segmentation by Jonathan Long, Evan Shelhamer, and Trevor Darrell from UC Berkeley. The authors introduce fully convolutional networks (FCNs) as a powerful approach for semantic segmentation, surpassing existing methods in pixel-wise prediction. The key innovation is to replace fully-connected layers with convolutional layers, allowing for end-to-end training and efficient inference on arbitrary-sized inputs. The FCN architecture incorporates both deep, coarse semantic information and shallow, fine appearance information for accurate segmentations. The paper reviews related work, emphasizes the efficiency of fully convolutional training over patchwise methods, and demonstrates state-of-the-art results on various datasets. The authors compare their approach to adaptations of deep classification nets for semantic segmentation, highlighting the end-to-end learning capability of FCNs. 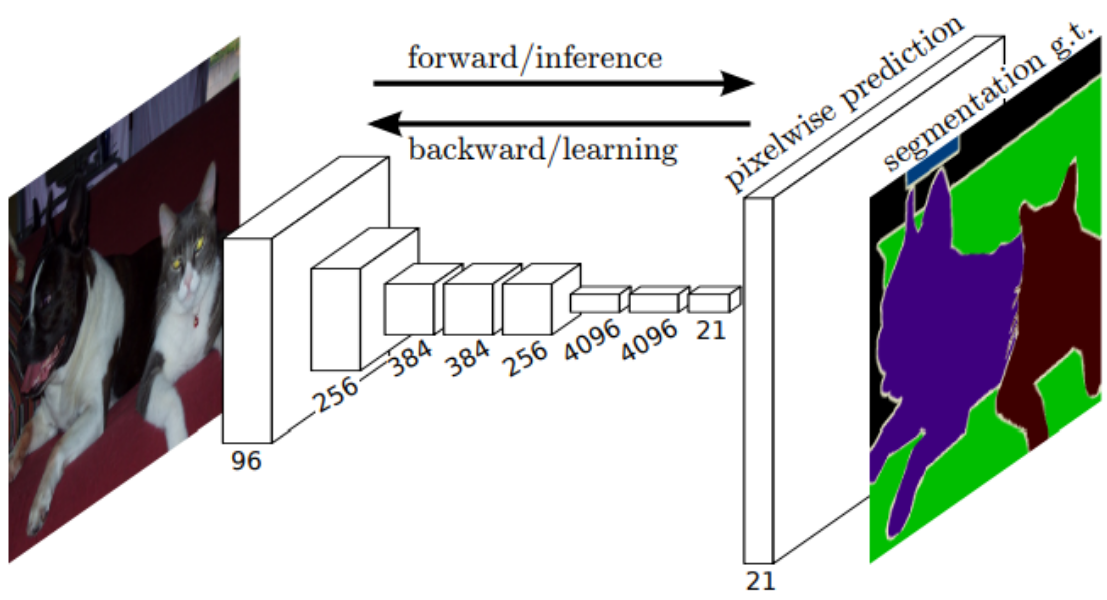
Published:
Image segmentation is a sophisticated technique in computer vision that involves partitioning an image into distinct, meaningful regions. Its primary objective is to analyze and understand the visual content within an image by assigning specific labels to different parts of the scene. This process aids in extracting valuable information for various applications, such as object recognition, scene understanding, and autonomous navigation. 
Published:
PointNet is a clever deep learning approach for understanding 3D geometric data, like point clouds. Unlike other methods that transform data into regular grids or images, PointNet directly processes point clouds, respecting their irregular nature. It’s a simple yet powerful neural network that handles tasks such as object classification and part segmentation efficiently. The key is using a symmetric function, max pooling, which helps the network select important points in the cloud. It’s not just fast; it’s also robust to changes in input points. The project includes a theoretical analysis, showing PointNet’s ability to approximate various functions, and an experimental evaluation, demonstrating its speed and competitive performance compared to other approaches. The contribution lies in designing a deep net architecture for unordered 3D point sets, showcasing its effectiveness in multiple tasks and providing insights into its stability and efficiency.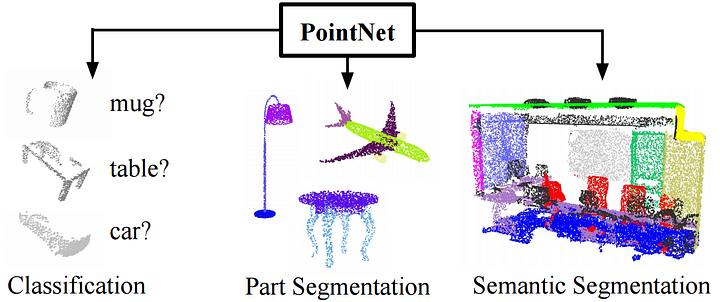
Published:
Welcome to the exciting world of Docker, where containerization opens up new possibilities in software development and deployment. In this journey, we will unravel the mysteries of Docker, guiding you step-by-step through the fundamentals. But that’s not all — brace yourself for a hands-on experience as we delve into installing Docker alongside ROS Noetic on Ubuntu 20.04.
Let’s explore Structure from Motion by figuring out the 3D layout of a small scene through a series of smartphone images. Choose nearby objects and take pictures with some overlap in what your camera captures. For accurate results, use a checkerboard to calibrate your camera — take a few shots from different angles. This calibration step provides vital info for the entire process.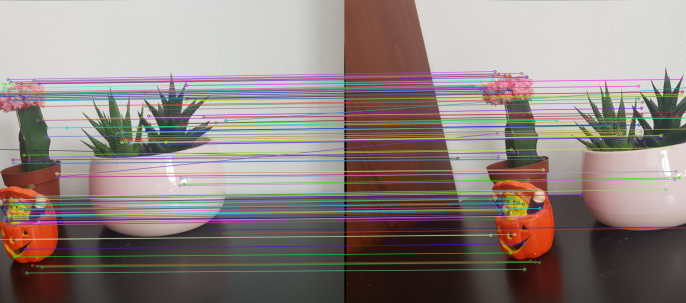
Get ready to explore the world of 3D segmentation as we take a journey through PointNet, a super cool way to understand 3D shapes. PointNet is like a smart tool for computers to look at 3D things, especially groups of points floating in space. It’s different from other methods because it works directly with these points, without forcing them into grids or pictures.
Published in Journal 1, 2009
This paper is about the number 1. The number 2 is left for future work.
Recommended citation: Your Name, You. (2009). "Paper Title Number 1." Journal 1. 1(1). http://academicpages.github.io/files/paper1.pdf
Published:
This is a description of your talk, which is a markdown files that can be all markdown-ified like any other post. Yay markdown!
Published:
This is a description of your conference proceedings talk, note the different field in type. You can put anything in this field.
Undergraduate course, University 1, Department, 2014
This is a description of a teaching experience. You can use markdown like any other post.
Workshop, University 1, Department, 2015
This is a description of a teaching experience. You can use markdown like any other post.